Safe collaboration between humans and robots in collaborative work systems is both possible and offers clear benefits, including in packaging processes. There are, how-ever, a number of prerequisites that need to be satisfied, and several machinery safety standards that must be taken into consideration.
From robot to cobot: this step offers benefits in various industrial automation applications, including in food packaging when smaller quantities of special-purpose packaging types are involved. Collaboration between humans and robots without fixed guards can help to boost flexibility considerably, which is exactly what’s needed with increasing production of smaller series sizes and when different products are produced on one and the same line.
Human-robot cooperation – including in packaging technology
In packaging machine engineering too, designers and engineers are now looking at what needs to be taken into consideration when designing robot cells with human-robot collaboration. The basic concept within this form of collaboration is that humans and robots work alongside one another within a single work system, whilst being shielded from the outside world by fixed guards. This means that that the cell must be enclosed by a protective fence with guard doors and access options into and out of the hazardous area – e.g. conveyors or transfer stations for the products that need to be processed within the cell.
What the cell does not need, or no longer needs, is physical separation or guards between the work areas occupied by humans and robots respectively. This marks a real turning point in robotics and automation technology: for decades, robots and operators were separated and robots had to do their work alone, under ‘lock and key’.
A combination with high value in use
Today, simultaneous activity between humans and robots within a single work system is part of the ‘Smart Factory’. There are now countless manufacturers of collaborative robots, or cobots, and a similar number of system integrators, whose systems make use of cobots to produce smaller series of products and packaging with high levels of productivity. Within each application, the strengths of the human operator (skill, dexterity, application of force, independent problem solving) are combined with those of the robot (precision, lack of fatigue, repeat accuracy).
Clear principles for collaboration
The normative basis for this new form of collaboration firstly needed to be established, with the aim of equipping the robot with protective devices to protect humans and ensure that it is a truly collaborative robot. Further details are provided below. As commonly applies when it comes to the safety of machinery (i.e. under the Machinery Directive), the ‘standards pyramid’ of harmonised type A, B and C standards also applies to collaborative robotics.
Basis: the general standards pyramid

Type A standards are the basic safety standards. EN ISO 12100 (risk assessment). More specific are the type B1 standards, which deal with specific safety aspects. Examples are the familiar EN ISO 13849 (safety-related parts of control systems) and EN ISO 11161 (integrated manufacturing systems). The type B2 standards cover individual types of safety device, e.g. emergency-stop devices (EN 13850).
There are several specialised standards or type C standards for robotics. These include:
- EN ISO 10218 Robots and robotic devices – Safety requirements, which is divided into two parts – part 1 (robots) and part 2 (robot systems and inte-gration). This defines the safety requirements that apply to robot cells.
- EN ISO 11161 Safety of machinery – Integrated manufacturing systems – Basic requirements
- ISO/TS 15066 Robots and robotic devices – Collaborative robots
The latter standard is not harmonised, that is it is not listed under the MRL. In addition, a revised version of the EN ISO 10218 series of standards is shortly due to be published. Part 2 of the series of standards will incorporate the requirements of ISO/TS 15066 from that point onwards, which will mean that all of requirements that apply to collaborative robot systems will soon be contained in EN ISO 10218-2.
In addition to the standards, other useful documents on the topic of the safety of machinery with collaborative robots are also available, e.g. DGUV Information 209-074 ‘Collaborative robot systems’ including a checklist, a VDMA position paper ‘Safety in human-robot collaboration’ and a number of white papers from TÜV Austria.
The route to a collaborative work system in accordance with ISO/TS 15066

A collaborative robot system can be accomplished in three steps:
- Use of a compliant robot in accordance with EN ISO 10218-1.
- Integration of the robot into a robot cell in accordance with the requirements of EN ISO 10218-2, with application of EN ISO 11161 where appropriate.
- Design of the collaboration area in accordance with ISO/TS 15066.
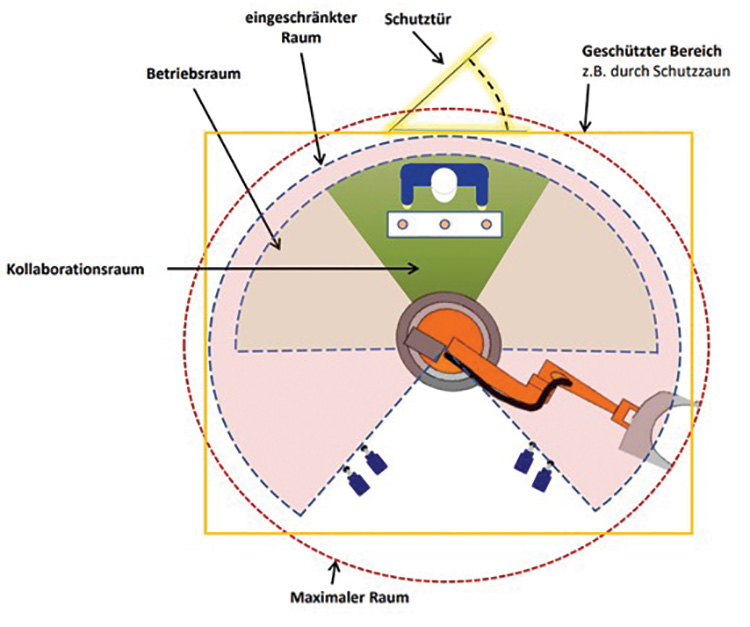
EN ISO 10218 defines the areas that must be taken into consideration in the design of safety measures for robot cells, i.e. maximum area, restricted area, operating area, protected area. In addition, collaborative robots also have a collaboration area, which is outlined in both EN ISO 10218-1 and ISO/TS 15066. It is in this area that humans and robots can work alongside one another. The corresponding operating mode is known as ‘collaborative operation’.
Concrete requirements for collaborative operation
So what specific requirements apply to the design and planning of a robot cell as a ‘collaborative work system’ in accordance with ISO/TS 15066? As soon as the cell layout has been defined, the designer should determine the hazards and perform a risk assessment. This will derive the measures that need to be taken to minimise the risk. The measures that are permissible for a collaborative work system are outlined in ISO/TS 15066, which defines the associated requirements.
Core process: designing the layout of the robot cell
Designing the layout is a core process of risk minimisation in collaborative robot cells. The layout defines the aforementioned areas, including the collaboration area, as well as the accesses to the hazardous areas. This important step must take into consideration both the ergonomics of the human-machine interface and the additional space that may be required for any overrun movements by the robot (e.g. after actuating the emergency-stop device).
Taking special hazards into consideration
One of the designer’s or safety engineer’s responsibilities is to take into consideration the particular hazard potential of robots and to feed this into the risk assessment. After all, there was a good reason for once separating humans and robots and their working areas. A useful aid here are the hazard lists in Appendix A to EN ISO 10218-1 and EN ISO 10218-2, which deal specifically with the hazards of robots and in robot cells.
A specific and potential hazard is the risk of robots performing movements with high energy and range, which means that their movement paths may be difficult to predict. In some cases, several robots working in the same operating area must also be taken into consideration. With this in mind, the collaboration space needs to be clearly defined and each operator in the same space, i.e. the working area of the robot, must carry their own control element with them. Fail-safe software for axis and spatial limitation is also required, and is typically made available by the robot manufacturer.
Options for design of collaborative operation
The ISO/TS focuses on four options for collaboration between robot and operator. These options include manual guidance of the robot (movement of the robot arm by human force), speed and distance monitoring (speed reduction through distance), safety-evaluated monitored stop (stop category 2, restart when leaving the collaboration area) and power and force limitation (risk minimisation through reduced forces).
Almost all options require realisation of a control system so that additional safety functions must be evaluated.
Example: power & force limitation
Unintended contact between human and robot is the principal risk associated with collaboration. The consequences of any contact must be minimised by means of power and force limitation. If there is a risk of contact in the collaboration area, exposure limits apply to the individual parts of the body, which must be observed. This can be accomplished with passive protective measures, such as foam padding, increasing the contact surface or limiting moving masses. As an alternative, the designer of the collaborative robot cell can actively prevent contact using control technology, perhaps by limiting the force or torque or by integrating a sensor system that can detect operators.
In focus: fail-safe monitoring
A number of different safety functions must be realised for collaborative operation of robot cells. What aspect is safety-monitored will depend on the selected realisation of collaborative operation, e.g. torque, force, speed or position of the robot axis. An operating mode selection switch and enabling switch will also usually form part of the safety equipment. The products and system solutions that are available, like those in Schmersal’s range, have already been tried and tested in similar applications.

After design: verification and validation
In accordance with ISO/TS 15066, the result of the design of a collaborative robot cell must ultimately be verified and validated. Considering the high hazard potential in robot systems, this step is an essential step so that confirmation of safety can ultimately be obtained and conformity with the Machinery Directive can be established. The user can benefit from the qualified services of Schermsal’s tec.nicum division both in this step and in upstream work steps, such as the conformity assessment, risk assessment and force and pressure measurement. The safety consultants working for tec.nicum have the expertise needed as well as high-level industry competence in packaging technology.
Author:
Benjamin Bottler M.Sc.,
Safety Consultant, Schmersal Group
![]()